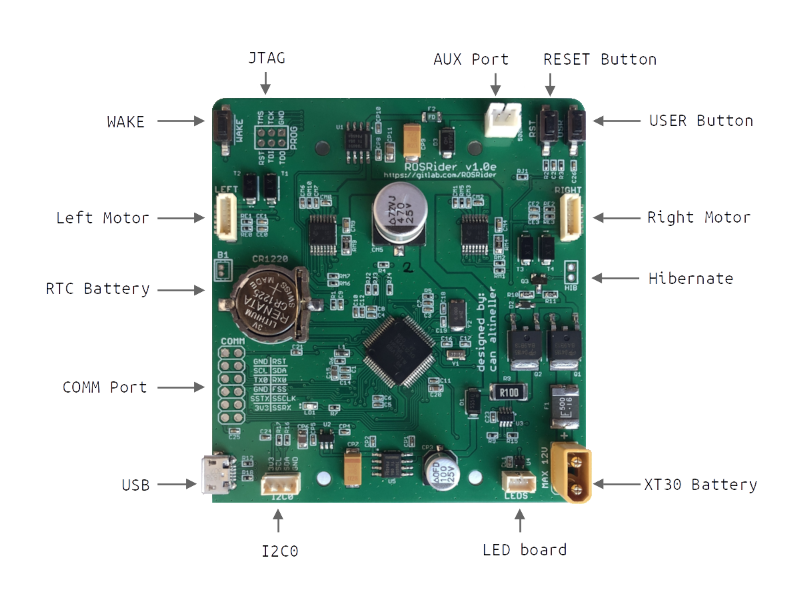
What is the ROSRider?
ROSRider is a low-cost robot control board, that can be configured for any differential drive robot.
www.rosrider.com
- ROSRider aims to be an Open Source robot control board that lowers the barrier for building a ROS based robot
- In technical terms: ROSRider provides a ROS-Native Hardware Abstraction Layer, that allows any differential drive robot to be controlled
- In simple terms: ROSRider, plugged to a USB port, turns any system into a ROS based differential drive robot
- Any motor, any reduction rate, any encoder configuration can be used
- Parameters such as gear ratio, encoder ppr, wheel diameter are passed from ROS to ROSRider board, thus allowing any encoder motor to be used as a servomotor Using the ROSRider board, and commodity parts, one can build a ROS based robot easily
- To purchase the board, please visit www.rosrider.com
- Detailed documentation available at https://rosrider.readthedocs.io and project related videos are posted at our youtube channel.
(c) Copyright, 2019, Can Altineller altineller@gmail.com